Overview
Human-Centric Automation is a rapidly evolving field that is transforming the way industries operate. This approach has a potential to improve productivity and safety in industries. Additionally, it will increase worker efficacy and reduce error. From this point of view, Research Center for Advanced Robotics and Intelligent Automation (ARIA), part of Wangchan Advanced Industrial Labs (WAI), focuses on developing human-centric automation technology for industrial 5.0 towards human-human, human-machine, and machine-machine collaborative intelligence.
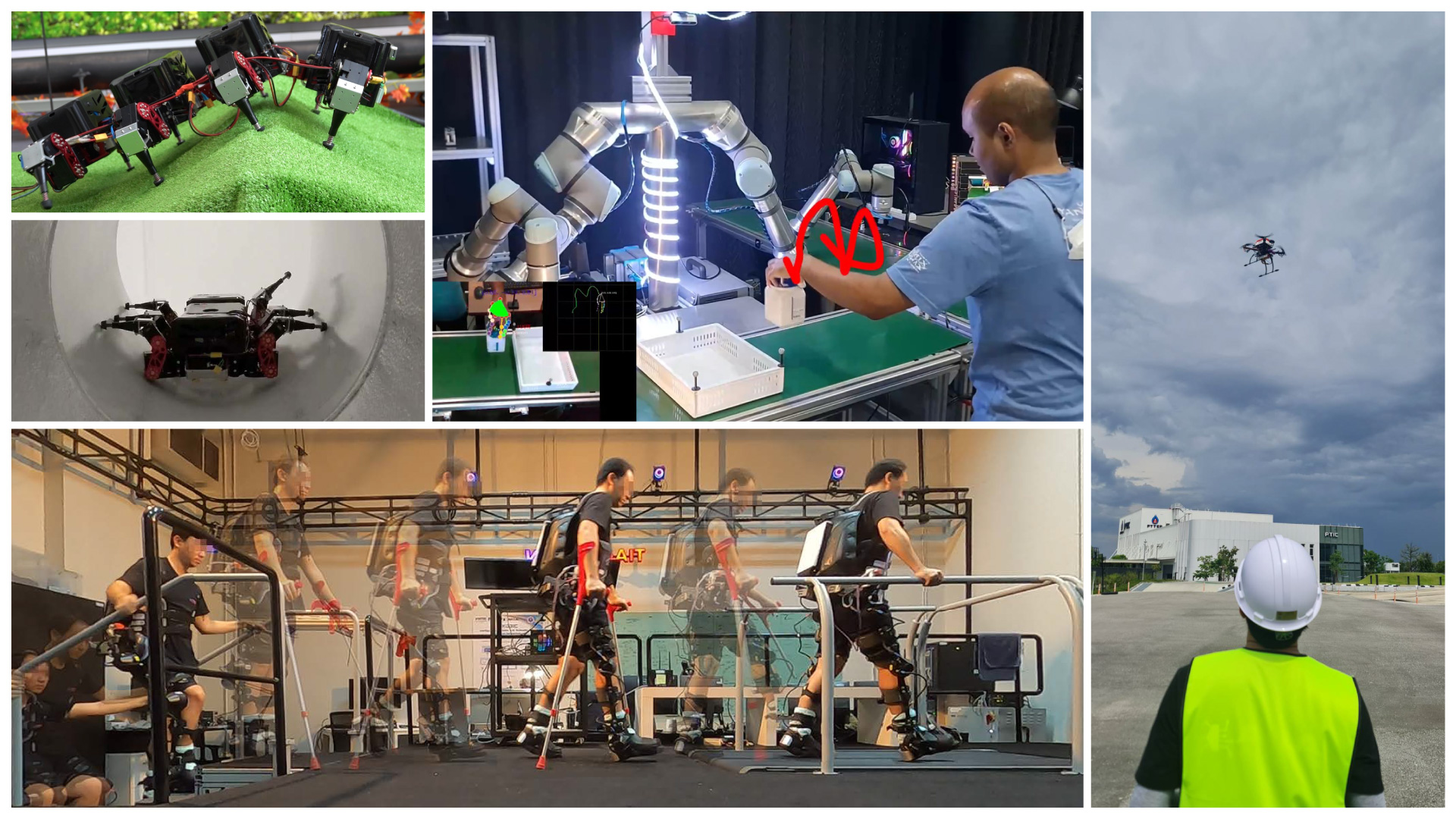
The human-centric automation technology is developed based on our basic research “Seven Wonders of Robotics” including: i) Bio-inspired robotics, ii) Soft robotics, iii) Medical robotics, iv) Inspection robotics, v) Service robotics, vi) Industrial robotics, and vii) Cognitive robotics. This will lead to intelligent machines (robots) that can safely and interactively collaborate with workers/users to achieve adaptive, flexible, and personalized solutions with seamless human-robot interfaces.